Kinetic is a decentralized motion intelligence subnet turning real human movement into high-quality training data for robotics and embodied AI - powered by proof of physical effort on Bittensor.
Kinetic is a Bittensor subnet designed to build the world’s largest decentralized network for capturing, validating, and commercializing high-quality human motion data - the missing infrastructure layer for robotics, embodied AI, XR, and healthcare AI.
Modern humanoid and embodied AI systems require massive volumes of diverse, precisely annotated real-world motion data to train manipulation, locomotion, and interaction models. Today, this data is scarce, fragmented, expensive to collect, and controlled by centralized entities. Kinetic solves this by turning human movement into a token-incentivized digital commodity.
Kinetic introduces a two-tier mining architecture:
Tier 1 - Wearable Sensor Mining
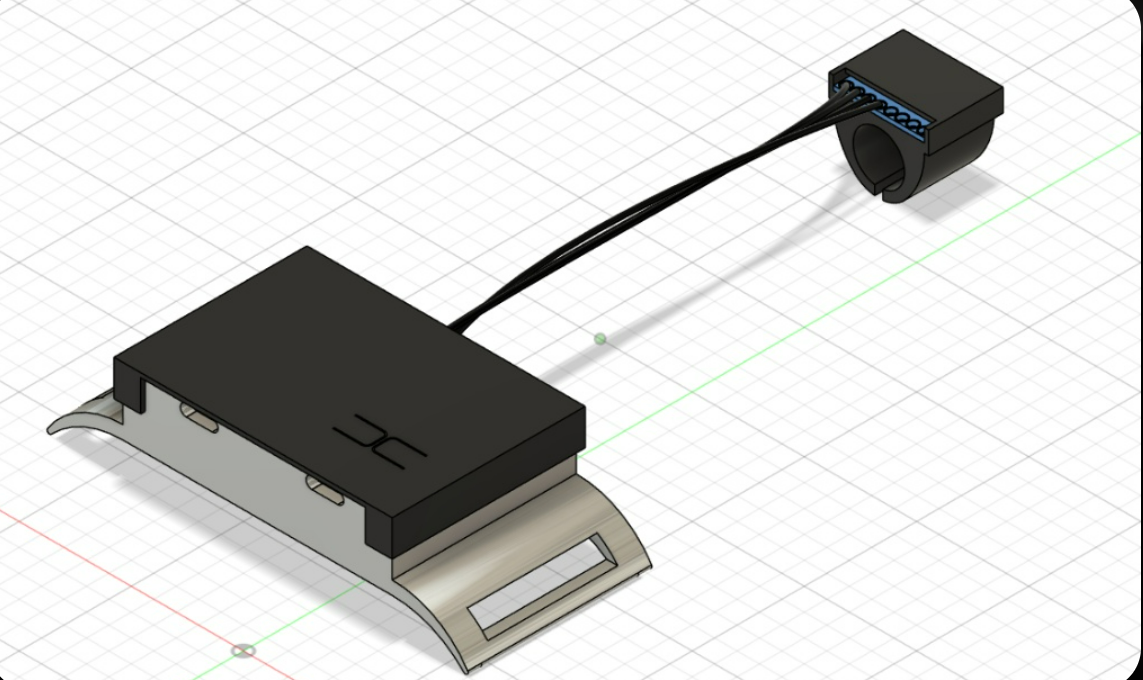
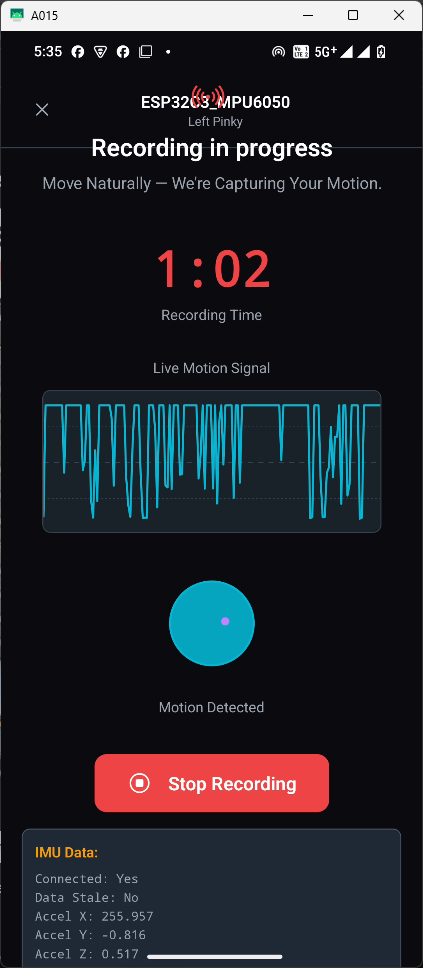
Participants use low-cost IMU-based hardware (ESP32-C3 + 9-axis sensors) to capture high-precision biomechanical data including acceleration, rotation, and joint angles. Hardware includes cryptographic attestation to ensure authenticity.
Tier 2 - Webcam Mining
Anyone with a standard webcam can contribute using real-time pose estimation (MediaPipe/OpenPose). This enables global accessibility with zero hardware barrier.
Miners receive structured motion tasks (e.g., manipulation sequences, locomotion patterns, household actions) and perform them physically. Submissions are evaluated through a multi-layer validation pipeline.
Automated Pre-Screening
Schema validation
Liveness detection via randomized micro-challenges
Duplicate detection
Device attestation verification
Deep Programmatic Validation
Biomechanical plausibility scoring
Dynamic Time Warping for task completion
Temporal consistency analysis
Spatial precision scoring
Liveness verification
Human Sampling Layer
15% of submissions undergo human review for calibration and anomaly detection
Final scores are determined using median consensus across validators to ensure robustness and prevent collusion.
Kinetic uses a quality-weighted proportional reward model:
70% emissions → miners
25% → validators
5% → subnet operations
Rewards are based on:
Quality score
Tier multiplier (hardware rewarded higher)
Diversity bonus (encourages underrepresented motion types)
Reputation multiplier
This ensures:
High-quality contributions are rewarded
Sybil attacks are economically discouraged
Validators are aligned with consensus accuracy
Robotics companies and research labs face a severe motion data bottleneck. Collecting high-quality real-world motion data is expensive and geographically limited. Kinetic leverages decentralization to unlock global diversity - across body types, cultures, environments, and task contexts.
Unlike labeling subnets that annotate existing datasets, Kinetic generates net-new, verifiable human motion data - a true “proof of physical effort” model.
The robotics data labeling market is projected to grow from $1.34B (2024) to $9.29B (2033). Humanoid robotics foundation models require exponentially more diverse motion data to scale. Kinetic positions Bittensor as core infrastructure for the embodied AI economy.
Kinetic aims to become the default decentralized motion data infrastructure for robotics, simulation platforms, and embodied AI training pipelines - enabling a global motion data economy where every movement counts and every contributor earns.
We focused on the mechanics: how to pay for good data, how to stop people from gaming the system, and exactly what hardware is needed. By the end, we turned a high-level idea into a detailed technical plan that we can actually start building
Pre-fundraising for now -focused on refining the idea and preparing for production. Excited to ship Kinetic with support from the Bittensor ecosystem.